近日,我院陈颖频副教授在视频目标跟踪研究领域取得重要进展,该成果以“Correlation filter object tracking algorithm based on spatial and channel attention mechanism”为题发表于国际权威期刊《Electronic Research Archive》(中科院4区,JCR Q1区期刊,IF=1.1)。
无人机目标跟踪通过连续的图像帧来识别和定位特定目标物体,以适应多种动态场景。然而,空中跟踪环境的复杂性、目标的多变性以及人们对跟踪实时性和准确度的高要求,在现实应用中实现精确且快速的无人机目标跟踪仍然具有挑战性。
基于判别式相关滤波的跟踪框架因其高效的运算和良好的跟踪性能成为目标跟踪领域的主流跟踪框架,特别适合于算力有限的边缘计算平台,如无人机、无人车驾驶等。尽管现有的无人机跟踪框架取得了显著进展,但仍面临诸多挑战亟待攻克。传统相关滤波跟踪方法将提升算法性能聚焦在特征表达、空间正则化技术和时间平滑性三个方面。然而,这些方法在处理多通道特征时,往往包含大量冗余和无关信息,忽视了不同通道特征的稀疏性,导致无人机跟踪系统难以有效区分类内干扰物与真实目标。由于忽略滤波器中冗余、干扰信息的去除以及遮挡场景下的滤波器保护,以至于在背景散乱、遮挡等复杂场景中表现不佳。
为解决上述问题,本文提出一种基于空间与通道注意力机制的相关滤波目标跟踪算法,如图1所示。该算法在滤波器空间方向引入纤维组稀疏约束,在行、列及通道方向引入切片组稀疏约束。以此进一步挖掘滤波器的结构稀疏特性,完成对空间与通道特征注意力的分配,从而去除冗余、干扰信息。该算法还引入时间约束项,使滤波器在时间帧之间平滑。此外,通过历史模板池对最佳候选样本进行可靠性分析,以决策滤波器是否更新,避免遮挡场景下因滤波器退化引起的跟踪失效问题。
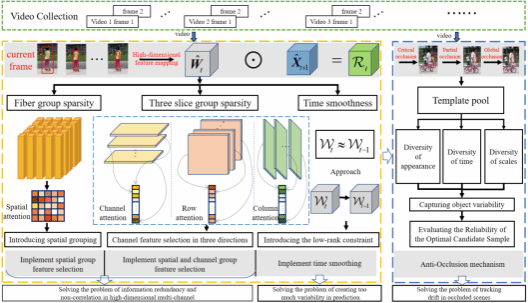
图1 提出方法的总体结构图
本文主要贡献有如下几方面:
(1)为充分挖掘滤波器的结构稀疏特性,对不同特征赋予不同的通道注意力、行组稀疏注意力、列组稀疏注意力以及纤维组稀疏空间注意力。利用注意力分配方案完成特征的约简和降维,显著提高跟踪器的性能。
(2)通过抗遮挡策略对最佳候选样本进行可靠性分析,利用阈值机制优化模型更新,避免以恒定学习率更新相关滤波器。这一做法既兼顾样本的多样性,又有效避免遮挡物引起的滤波器退化问题,从而有望应对复杂环境下的跟踪挑战。
(3)在UAV123、UAV20L、DTB70和OTB基准测试平台上,我们进行了广泛的实验评估,以验证所提出方法的有效性。实验结果表明,所提出的滤波器性能优于其他先进的跟踪器,实现鲁棒的无人机目标跟踪。
| 
|
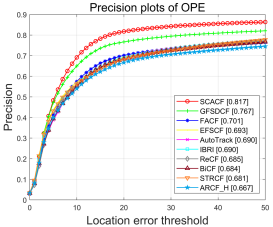
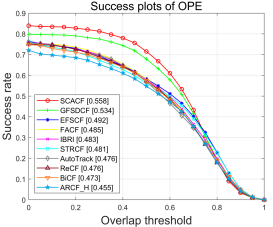
(a) 精度图 | (b) 成功率图 |
图2 我们提出的跟踪器和其他九种最先进的跟踪器在UAV123上的精度图和成功率图 |
由于无人机拍摄的特性,UAV123数据集视频序列中的目标常面临快速运动、遮挡和光照变化等挑战,适用于评估和开发先进的目标跟踪算法。图2展示本文算法SCACF与其他9种最先进的目标跟踪算法在UAV123数据集上的精度图和成功率图。如综合评估结果表明,SCACF算法在精度和成功率方面均表现优异,适用于无人机跟踪。
表1展示SCACF与其他9种最先进的跟踪算法在每种挑战性属性下的精确度。表2展示SCACF与其他9种最先进的跟踪算法在每种挑战性属性下的成功率。每个属性中表现前三的算法分别用红色、绿色和蓝色显示。实验结果表明,SCACF算法在处理复杂任务时,展现了更强的适应性与稳定性,充分体现其卓越的性能。值得注意的是,在光照变化、遮挡、背景杂乱等挑战性场景下,SCACF算法仍能保持较高的精确度和成功率。
表1 UAV123上12个具有挑战性属性的精确度
属性 | SCACF | GFSDCF | FACF | AutoTrack | ARCF_H | ReCF | IBRI | BiCF | EFSCF | STRCF |
SV | 0.794 | 0.738 | 0.663 | 0.651 | 0.626 | 0.645 | 0.651 | 0.643 | 0.655 | 0.643 |
ARC | 0.788 | 0.719 | 0.626 | 0.628 | 0.586 | 0.621 | 0.616 | 0.600 | 0.605 | 0.586 |
LR | 0.717 | 0.635 | 0.629 | 0.595 | 0.534 | 0.602 | 0.611 | 0.602 | 0.616 | 0.589 |
FM | 0.761 | 0.732 | 0.582 | 0.542 | 0.552 | 0.573 | 0.567 | 0.569 | 0.561 | 0.554 |
FO | 0.649 | 0.605 | 0.477 | 0.464 | 0.431 | 0.485 | 0.489 | 0.504 | 0.487 | 0.488 |
PO | 0.752 | 0.691 | 0.605 | 0.586 | 0.571 | 0.591 | 0.605 | 0.583 | 0.617 | 0.587 |
OV | 0.715 | 0.681 | 0.584 | 0.562 | 0.542 | 0.563 | 0.569 | 0.580 | 0.546 | 0.570 |
BC | 0.739 | 0.667 | 0.563 | 0.579 | 0.526 | 0.562 | 0.578 | 0.556 | 0.532 | 0.502 |
IV | 0.843 | 0.765 | 0.630 | 0.629 | 0.586 | 0.646 | 0.609 | 0.618 | 0.586 | 0.538 |
VC | 0.802 | 0.732 | 0.622 | 0.624 | 0.596 | 0.630 | 0.610 | 0.628 | 0.596 | 0.581 |
CM | 0.800 | 0.762 | 0.684 | 0.660 | 0.646 | 0.653 | 0.674 | 0.651 | 0.668 | 0.658 |
SO | 0.786 | 0.723 | 0.698 | 0.661 | 0.684 | 0.698 | 0.703 | 0.634 | 0.717 | 0.648 |
表2 UAV123上12个具有挑战性属性的成功率
属性 | SCACF | GFSDCF | FACF | AutoTrack | ARCF_H | ReCF | IBRI | BiCF | EFSCF | STRCF |
SV | 0.533 | 0.505 | 0.454 | 0.444 | 0.422 | 0.443 | 0.451 | 0.441 | 0.460 | 0.448 |
ARC | 0.508 | 0.475 | 0.410 | 0.415 | 0.384 | 0.409 | 0.413 | 0.397 | 0.413 | 0.398 |
LR | 0.428 | 0.374 | 0.362 | 0.338 | 0.285 | 0.340 | 0.356 | 0.332 | 0.352 | 0.337 |
FM | 0.478 | 0.460 | 0.376 | 0.363 | 0.353 | 0.370 | 0.371 | 0.364 | 0.354 | 0.347 |
FO | 0.353 | 0.327 | 0.243 | 0.233 | 0.212 | 0.246 | 0.261 | 0.254 | 0.251 | 0.258 |
PO | 0.498 | 0.464 | 0.400 | 0.392 | 0.369 | 0.395 | 0.412 | 0.390 | 0.424 | 0.402 |
OV | 0.470 | 0.462 | 0.407 | 0.401 | 0.380 | 0.400 | 0.411 | 0.415 | 0.397 | 0.410 |
BC | 0.472 | 0.433 | 0.334 | 0.345 | 0.315 | 0.345 | 0.350 | 0.341 | 0.335 | 0.318 |
IV | 0.558 | 0.513 | 0.397 | 0.404 | 0.389 | 0.472 | 0.415 | 0.408 | 0.390 | 0.354 |
VC | 0.536 | 0.506 | 0.419 | 0.424 | 0.402 | 0.434 | 0.421 | 0.429 | 0.421 | 0.406 |
CM | 0.552 | 0.536 | 0.478 | 0.465 | 0.450 | 0.460 | 0.475 | 0.457 | 0.474 | 0.470 |
SO | 0.530 | 0.490 | 0.468 | 0.447 | 0.448 | 0.467 | 0.477 | 0.433 | 0.491 | 0.451 |

| 
| 
| 
| 
|

| 
| 
| 
| 
|

| 
| 
| 
| 
|

| 
| 
| 
| 
|
| 
| 
| 
| 
|
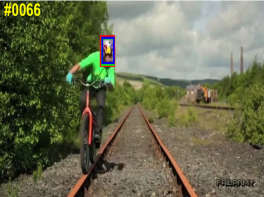
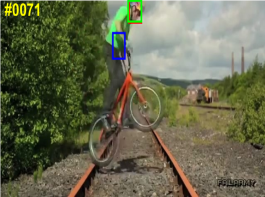
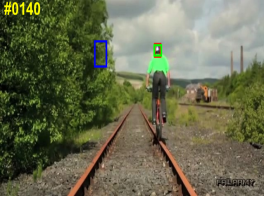
(a) person1_s | (b) group3_4 | (c) person21 | (d) wakeboard6 | (e) car7 |
 SCACF SCACF
|
 GroundTruth GroundTruth
|
 GFSDCF GFSDCF
|
 FACF FACF
|
 ReCF ReCF
|
 IBRI IBRI
|
 BiCF BiCF
|
 EFSCF EFSCF
|
 STRCF STRCF
|
 Auto Track Auto Track
|
图3 可视化不同视频序列上的跟踪效果 |

| 
|
(a) | (b) |
| 
|
(c) | (d) |
SCACF Ground Truth BACF
|
图4 有无组稀疏正则化对比实验 |

| 
|
(a) | (b) |

| 
|
(c) | (d) |
SCACF Ground Truth GFSDCF
|
图5 有无抗遮挡策略对比实验 |
闽南师范大学为该工作唯一通讯单位,我院2022级硕士研究生陈开伟为论文第一作者,陈颖频副教授为唯一通讯作者。研究得到了福建省自然科学基金 (2024J01820, 2024J01821, 2024J01822),漳州市自然科学基金 (ZZ2023J37)资助。
论文链接:https://www.aimspress.com/article/doi/10.3934/era.2025219
(图/文:陈颖频)